As I wrote in my first post, I got started building a fly sorter in October 2013 and gave myself 6 months to see where it took me. Obviously, that time has passed — so what happened?
You might have guessed, given that I’m still working on the project, that I was successful in building a prototype sorter, and you’d be right. Here it is:
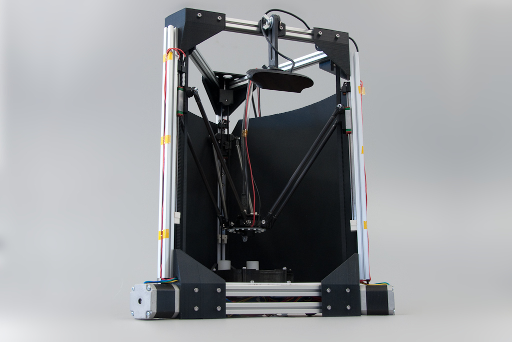
I spent the better part of the winter here in Boston holed up at my work space at Industry Lab learning, building, and testing, and by March had a system that could sort flies by sex. Not bad!
The system has a few different components:
Stage – this is where the flies start. The stage is made from porous polyethylene and connected to a CO2 manifold, which anesthetizes the flies.
Robot – the stage sits at the base of a delta robot, which can access any flies on the stage.
Imaging – there are actually two cameras in the system. The first has a view of the stage from above, and is used to locate flies on the stage. The second camera is mounted to the end effector of the robot, and can take a high-resolution image of a fly on the stage.
Manipulator – the end effector of the robot is also connected to a vacuum pump. Turning the pump on when the effector is above a fly sucks the fly up, and it can be re-deposited by turning the pump off.
Computer software – the whole setup is connected to a computer. Custom software on the computer controls the robot, interfaces with the cameras, and performs the image analyses.
For now, the prototype sorts flies by sex (male & female), but many improvements are on the way:
- Sorting by eye color and virgin status (whether a fly is female and has just recently hatched). Other criteria, such as presence of GFP, are under investigation.
- Increased sorting speed.
- An easy-to-use software interface.
Questions? Let me know in the comments below, or by email.