Annnnnd… there went a year without updates. But it wasn’t a year without progress; this is what we’ve been up to:
If you’re really dedicated (thanks!), you might recall that FlySorter launched a couple of products in 2015: the Fly Dispenser and the FlyPlate system. They’re still going strong, and remain solid building-blocks for our future. And our goals for that future haven’t changed, either: we are building solutions that help Drosophila labs automate a variety of tasks.
FlySorter took on some consulting work this year, creating custom equipment for a few different institutions:
- In collaboration with the de Bivort Lab at Harvard, we are updating our general-purpose fly handling robot. We set out to build a robot that could load their maze assays, as well as take care of other, yet-to-be-determined tasks in the future. It’s a like a liquid handling robot (think OT-One) for Drosophila. As soon as we get the kinks ironed out, we’ll post source code, mechanical design files, and instructions so anyone can build one.
- The Ayroles Lab at Princeton strives to understand the biological basis of individual variation, and are putting our FlyPlates to good use in the process. It became clear that loading the plates was a rate limiting step in their experiments, so FlySorter built a plate loading robot to help them out.
- In Miami, the Klein Lab also studies individuality, but primarily uses fruit fly larvae as subjects. We built and are currently refining the design of a custom robot to re-position larvae on an agar plate, which extends the duration of the lab’s experiments.
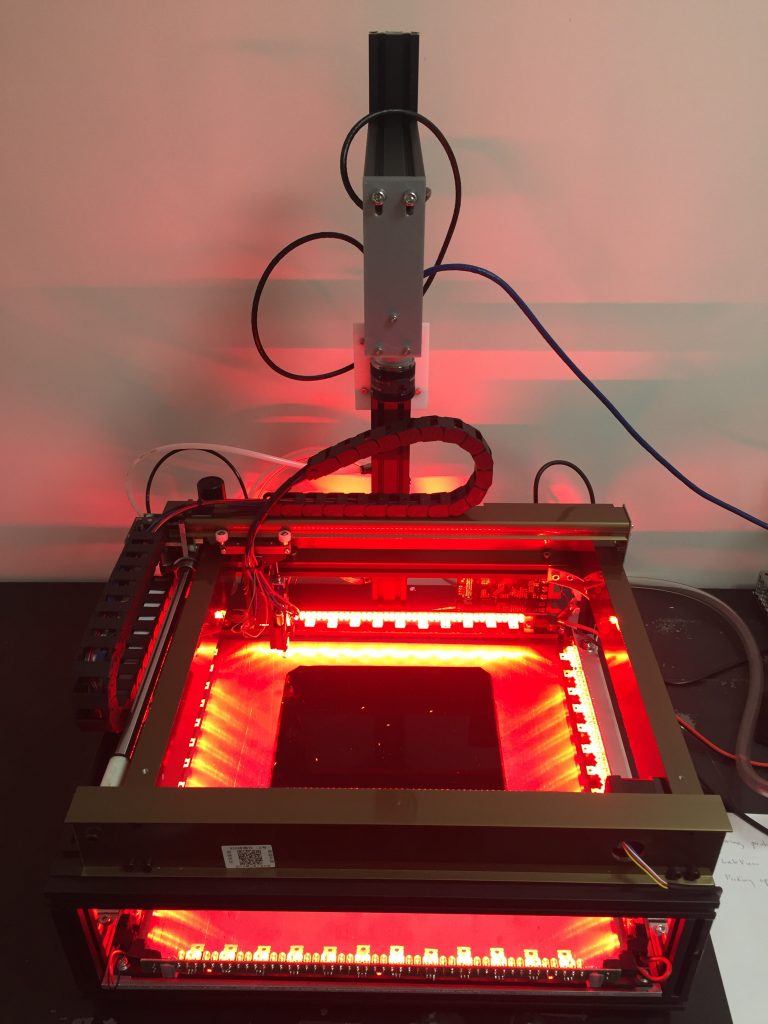
We’ve also made good progress on our imaging rig, the next key step in creating a fully automated, high-throughput fly sorter. Here’s a photo of the latest and greatest (a prototype to be sure, but getting close to functional):
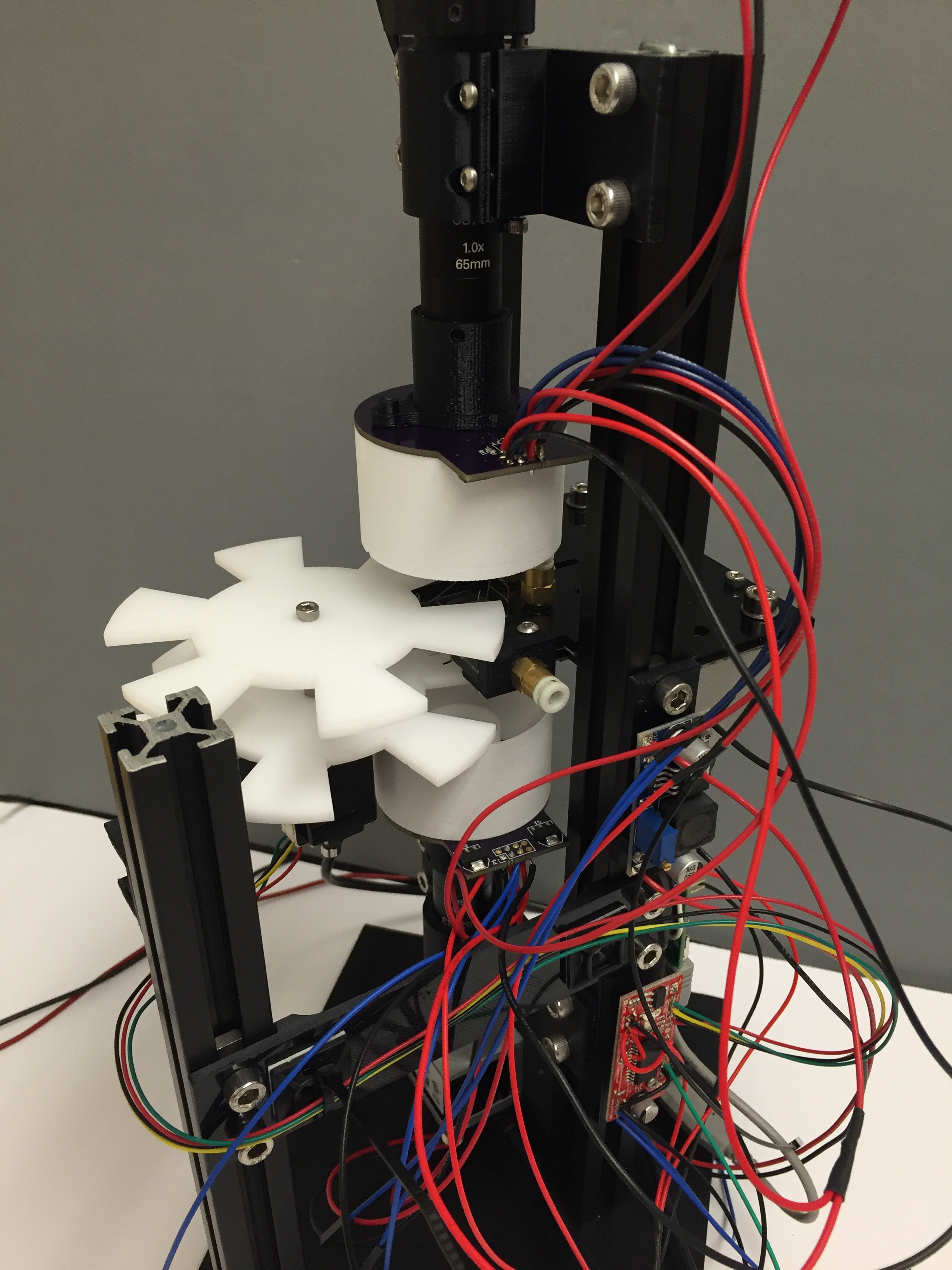
This system will soon be able to automatically capture high-resolution images (dorsal and ventral views) of each fly in a vial. From there, it’s on to classification software!